RIEGL VZ-2000i
- Częstotliwość powtarzania impulsów laserowych do 1 200 kHz
- Zasięg pomiaru do 2 500m
- Automatyczna rejestracja pomiarów w czasie rzeczywistym
- Do 15 punktów z 1 impulsu lasera

Bazując na skierowanej w przyszłość, innowacyjnej architekturze przetwarzania, łączności internetowej oraz najnowszej RIEGL’owskiej technologii LiDARowej przetwarzania danych, RIEGL VZ-2000i – system skanowania laserowego 3D dalekiego zasięgu łączy w sobie sprawdzoną przyjazną użytkowność w terenie z szybkim i wysoce precyzyjnym pobieraniem danych.
Zalety skanera RIEGL VZ-2000i
Wysoce zaawansowania technologia przetwarzania, umożliwia jednoczesne zbieranie danych, geo-referencje, filtrowanie i analizę w czasie rzeczywistym
Automatyczna rejestracja danych podczas skanowania
Wysoka częstotliwość powtarzania impulsu laserowego do 1,2 MHz
Szybka transmisja danych do 500 000 pomiarów / sek.
Zasięg do 2500 m, dokładność 5 mm
Bezpieczna praca dla oka w klasie Laser 1
Szerokie pole widzenia, 100 ° x 360 °
Wysoka dokładność oraz precyzja bazująca na digitalizacji echa przetwarzania i analizie fali online
Łatwość obsługi; interfejs ekranu dotykowego przyjazny dla użytkownika
Łączność poprzez Wi-Fi i 3G / 4G LTE
Możliwość wielokrotnego celu
Czujnik orientacji dla oszacowania pozycji
Zdalne sterowanie
Zintegrowany odbiornik GNSS
W pełni kompatybilny z mobilnym systemem RIEGL VMZ
Główne zastosowania
Topografia i górnictwo
Badanie zagrożeń naturalnych
Monitoring placu budowy
Archeologia i dziedzictwo kulturowe
Modelowanie miast
Badanie tuneli
Inżynieria lądowa i wodna
Prace badawcze
Główne cechy i dodatkowe komponenty skanera RIEGL VZ-2000i
Zewnętrzny odbiornik GNSS z połączeniem Bluetooth
RIEGL VZ-2000i oferuje interfejs dla wysokiej klasy zewnętrznego odbiornika GNSS, który może zostać zamontowany na urządzeniu, aby umożliwić precyzyjną rejestrację danych skanowania w układzie globalnym. Aby zapewnić płynną pracę w terenie, dane GNSS są przesyłane do skanera za pomocą transmisji Bluetooth lub kabla.
Zasilanie z ładowanymi bateriami
RIEGL VZ-2000i można podłączyć do następujących opcjonalnie dostępnych akumulatorów:
- NOWY akumulator RIEGL RBLI 2900 (3 X 99 Wh)
- Dodatkowy akumulator NiMH RIEGL RBNE 2210 (205 Wh)
- Bateria NIMH (235 Wh)
- pozostałe zasilanie o napięciu 11 – 34 V DC
Możliwość montażu aparatu
Wysoce precyzyjny uchwyt umożliwia integrację z opcjonalną kamerą DSLR. Kamera może być łatwo zintegrowana z uchwytem za pomocą dwóch śrub mocujących. Kombinacja skanera, oprogramowania i kamery daje w rezultacie szczegółowe foto realistyczne dane 3D, o dużej szczegółowości.
Kompatybilne pakiety oprogramowania
RIEGL VZ-2000i jest kompatybilny z pakietem oprogramowania RIEGL RISCAN PRO , biblioteką interfejsów RIEGL RIVLIB, jak również pakietami oprogramowania np. RIMINING, RISOLVE.
Automatyczna rejestracja danych w czasie skanowania
Jednoczesne skanowanie i pozyskanie zdjęć
Metody rejestracji danych 3D
Bezpośrednia geo-referecja danych uzyskana w terenie:
- podłączony zintegrowany odbiornik GPS (L1)
- zewnętrzny wysokiej klasy odbiornik GNSS RTK
- zintegrowany kompas, typ dokładności 1° (jedna wartość sigma, dostępna dla pionowej pozycji ustawienia skanera)
- wbudowane czujniki nachylenia (zakres pochylenia ±10°, dokładność wyznaczenia pochylenia +0,008″)
Określanie lokalizacji z wykorzystaniem nawigacji satelitarnej GNSS
- pozycja GNSS (RTK lub autonomiczna)
- wbudowane czujniki nachylenia skanera
- automatyczna pozyskanie punktu (reflektor)
Szybkie wykrywanie i skanowanie punktów pomiarowych oraz luster geodezyjnych w celu dokładnego określenia pozycji skanera.
Określanie pozycji z wykorzystaniem “wcięcia wstecz“
Łączność z “chmurą”
Seria RIEGL VZi zapewnia łączność w chmurze za pośrednictwem sieci 3G/4G LTE, WI-FI lub LAN. Zawartość przesyłana, przechowywana i pobierana z chmury, jak również odpowiedni dostawca pamięci masowej w chmurze lub serwer FTP są definiowane przez użytkownika. Zdefiniowane dane są następnie przenoszone do chmury po zakończeniu każdego skanowania. Obsługiwane pamięci masowe w chmurze obejmują obecnie Amazon S3 i Microsoft Azure.
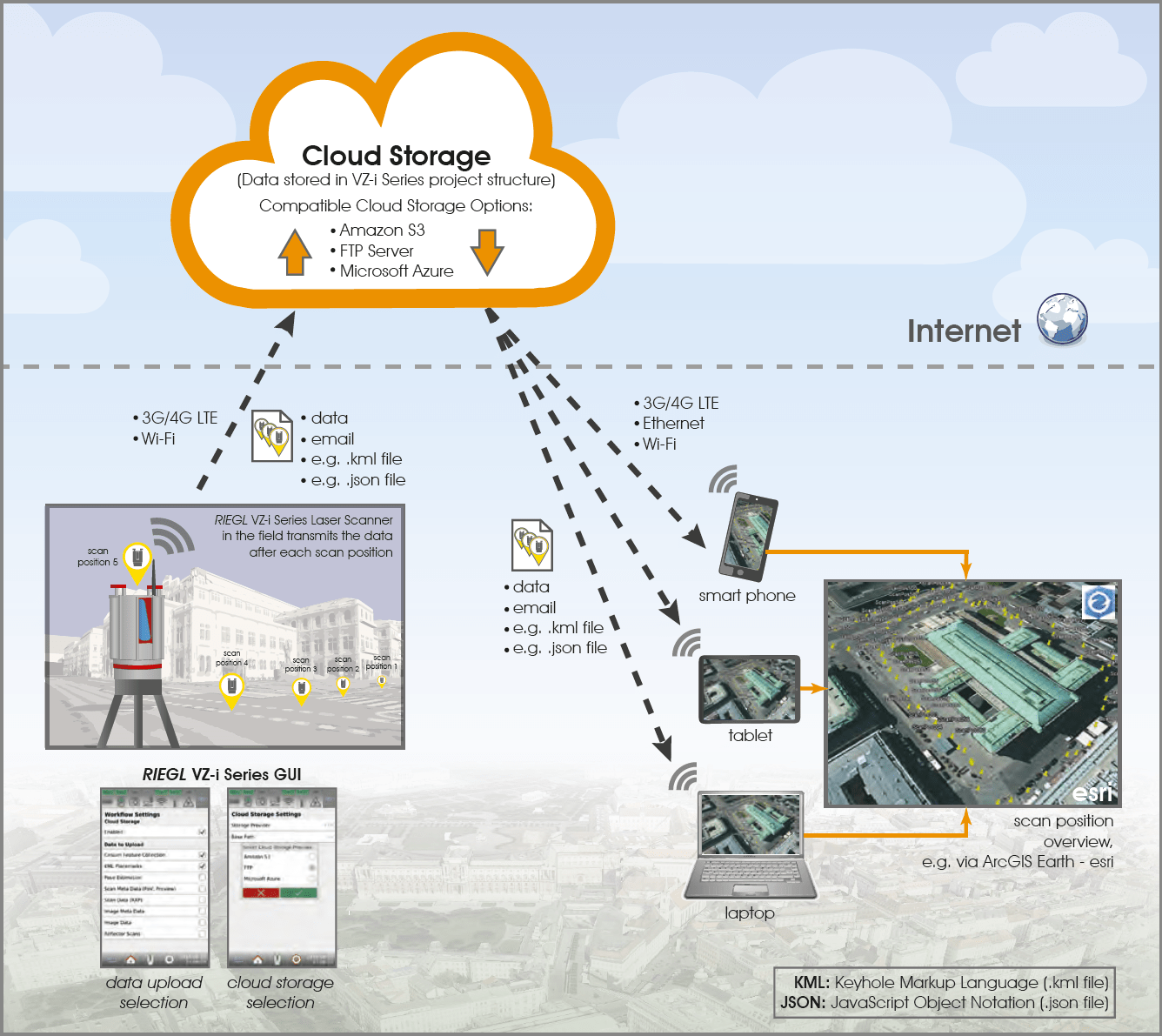
W skład danych przysyłanych wchodzą:
pozycję skanera w układzie współrzędnych geograficznych WGS84 jako *kml oraz *json oraz podgląd danych ze skanowania jako obraz w formacie *.png
miniaturki obrazów jako *jpg
dane obrazu jako *.jpg
dane ze skanowania *rxp
dane obrazu jako *.jpg
komunikaty o błędach
Uwaga: Należy pamiętać o odpowiedniej przepustowości transmisji danych.
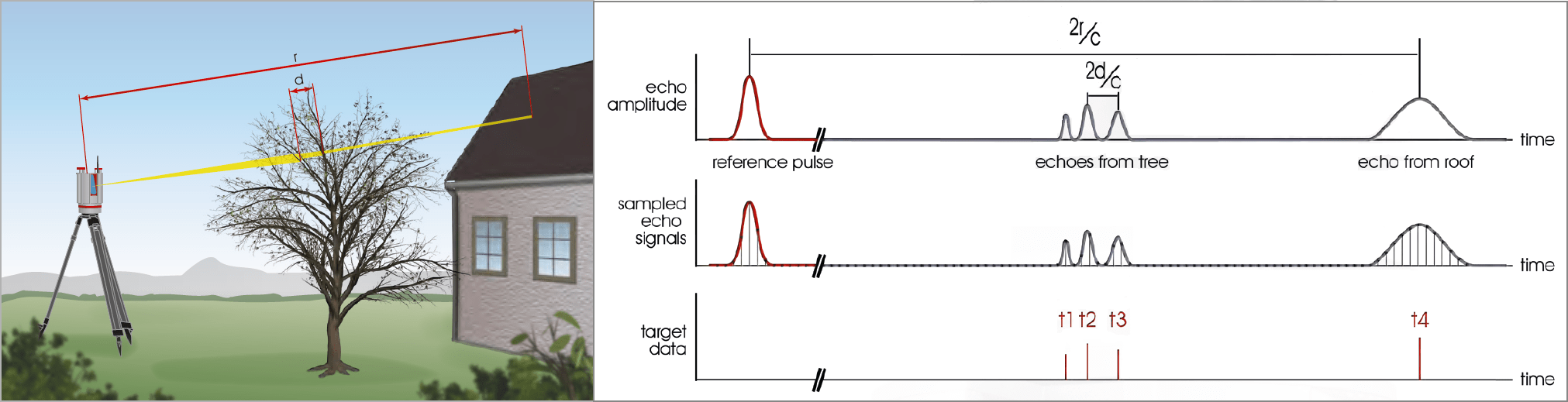
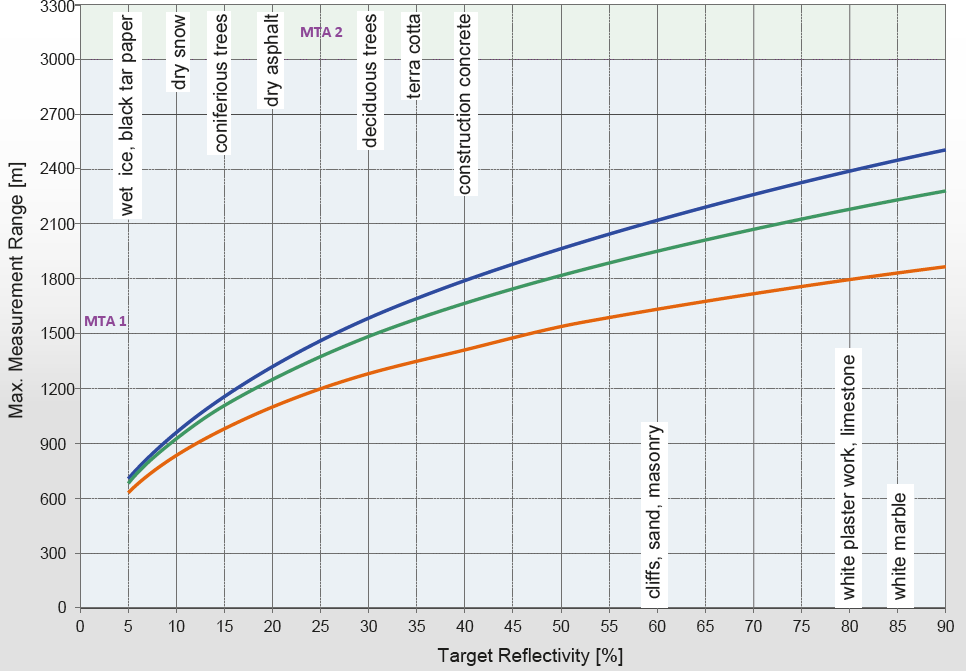
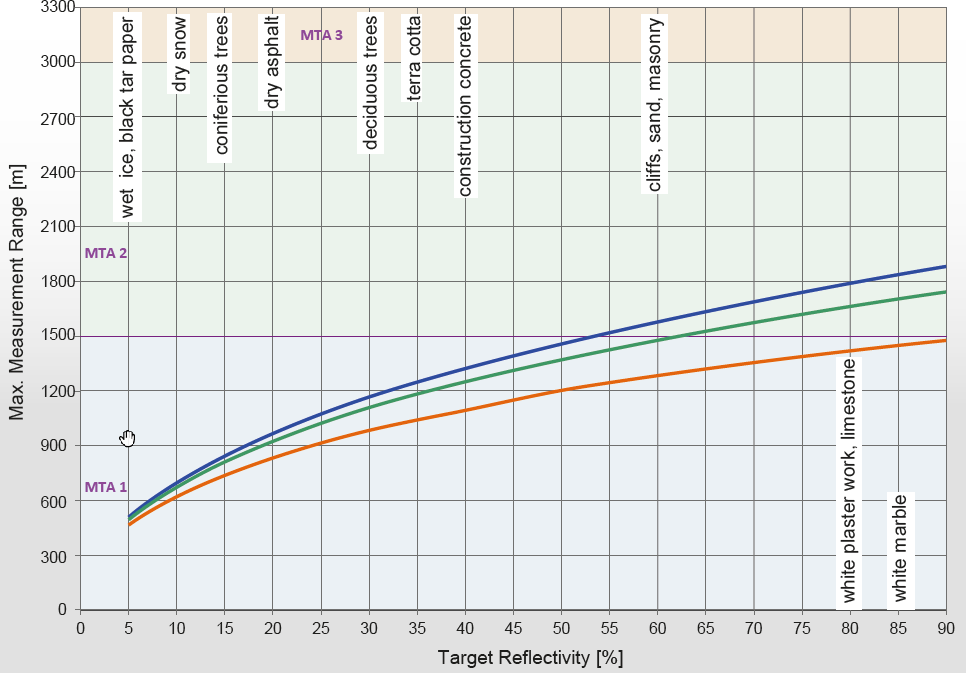
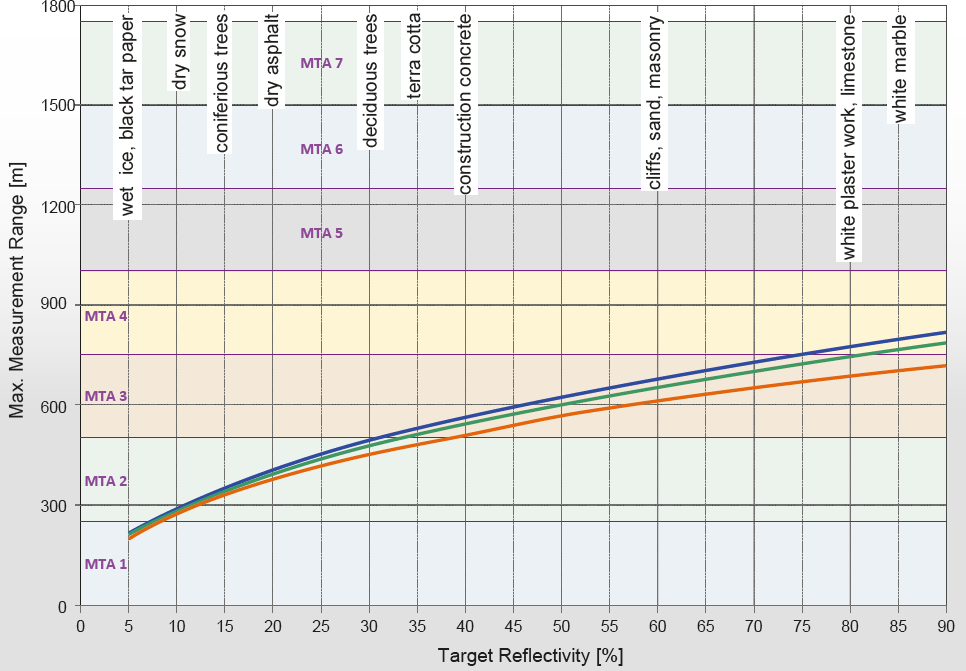
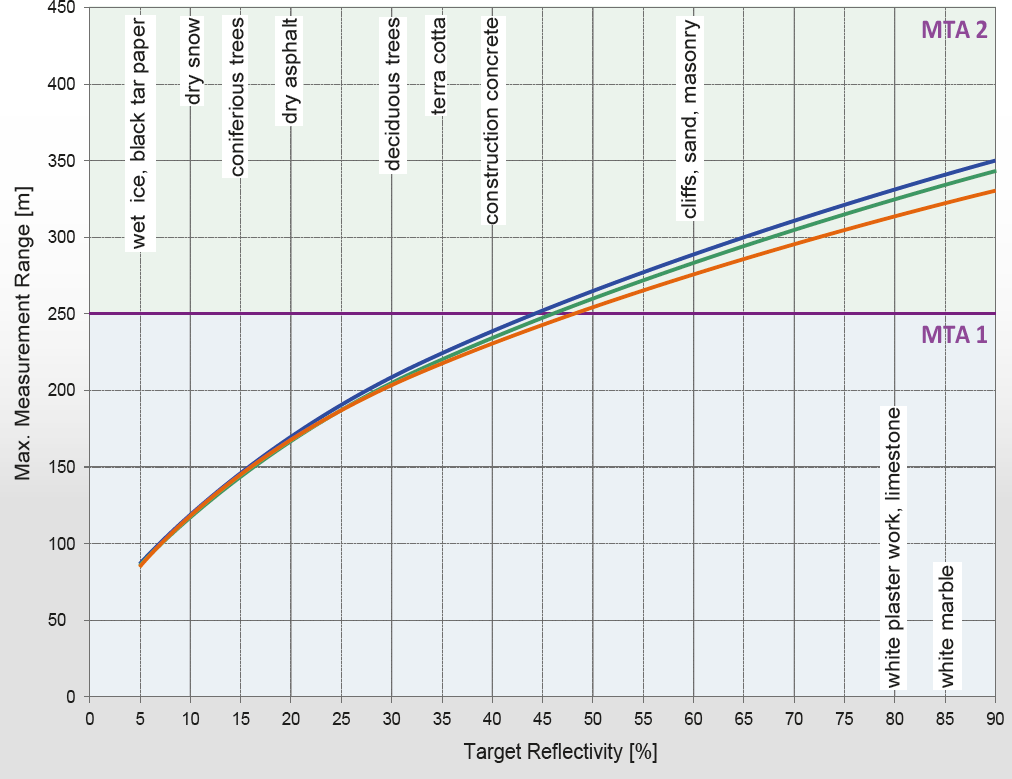
Zdolność do pomiaru wielu celów – podstawa do wysokiej penetracji.
Wykorzystując metodę impulsowego pomiaru czasu lotu do pomiarów zasięgu lasera, VZ-2000i umożliwia wyznaczenie zasięgu do wszystkich celów, z którymi współdziała pojedynczy impuls lasera. W zależności od zastosowanego programu pomiarowego, maksymalna liczba wykrywanych celów jest zmienna (4-15).
Filtracja po odchyleniu kształtu impulsu
Jeżeli odległość pomiędzy dwoma celami jest zbyt mała, aby rozróżnić te dwa echa, skaner pozsykuje informacje o kształcie impulsu powrotnego. Pozwala to na rozróżnienie, czy echo powrotne pochodzi od jednego celu, czy od dwóch pobliskich celów. Prosta filtracja w odniesieniu do informacji o kształcie impulsu może usunąć większość nieprawidłowych” punktów i zachować tylko wiarygodne “prawdziwe” cele.
orginalne dane

selekcja “błędnych punktów”

finalna chmura punktów
Skanuj podczas deszczu i zamglenia
Za pomocą filtrów odchylenia i intensywności odbicia można zidentyfikować, wybrać lub usunąć pomiary zasięgu spowodowane przez krople deszczu oraz zamglenie, w wyniku czego powstaje czysta i przejrzysta chmura punktów.

skanowaniew deszczu

chmura punktów przed filtracją

finalna chmura punktów
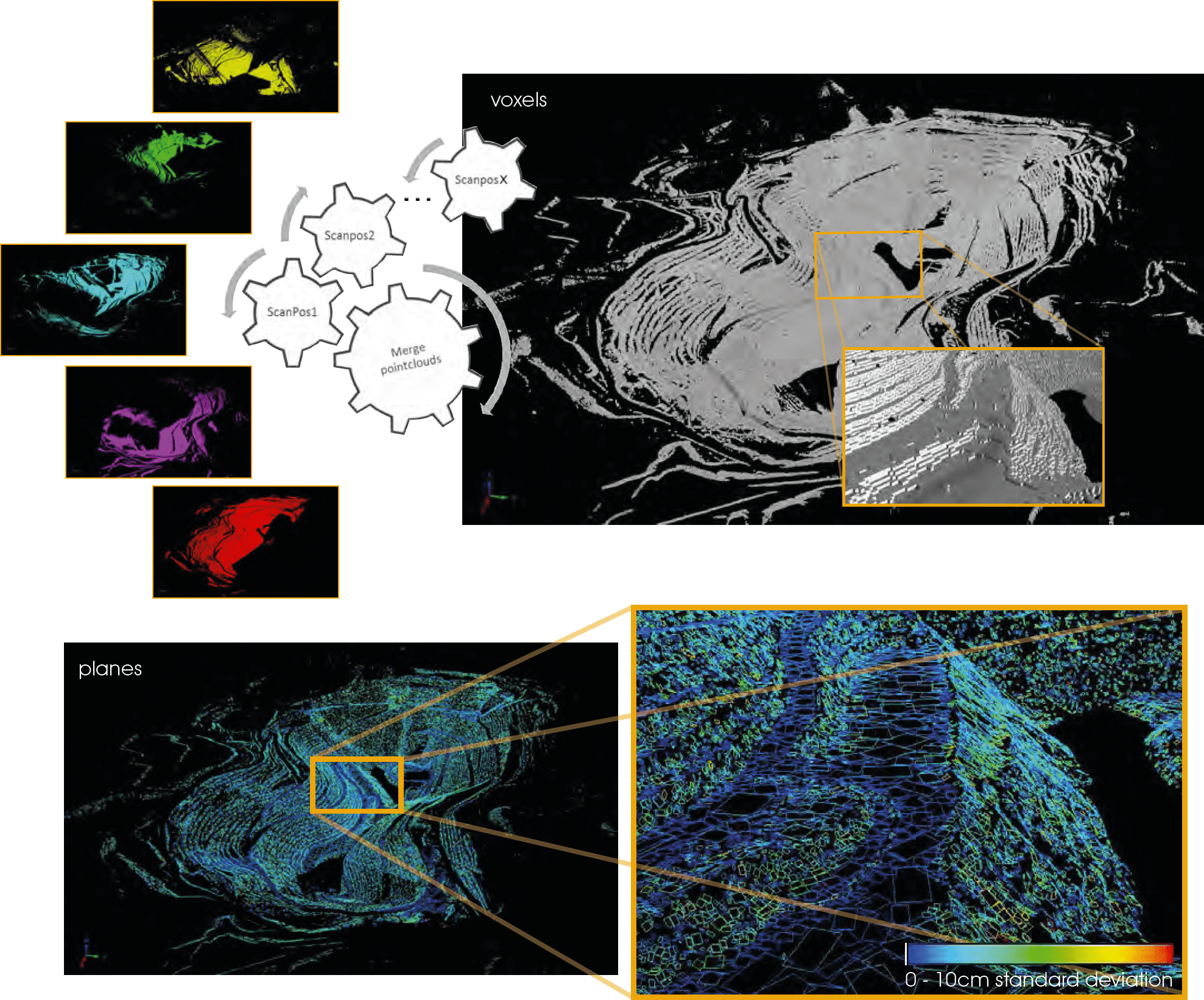
Automatyczna rejestracja danych w czasie rzeczywistym
Rejestracja chmur punktów o różnych pozycjach skanowania, jest zawsze jednym z najbardziej czasochłonnych zadań podczas późniejszego przetwarzania projektów skanowania 3D.
Dzięki wbudowanym dwóm procesorom, RIEGL VZ-2000i jest w stanie wykonywać różne procesy w czasie rzeczywistym, np. automatyczną rejestracja skanów wraz z pozyskiwaniem nowych skanów.
Procesor 1:
- skanowanie i jednoczesne pozyskiwanie zdjęć
- określanie pozycji skanera wykorzystując GNSS / IMU / pozostałe sensory
Procesor 2:
- konwersja skanów do bazy danych RIEGL
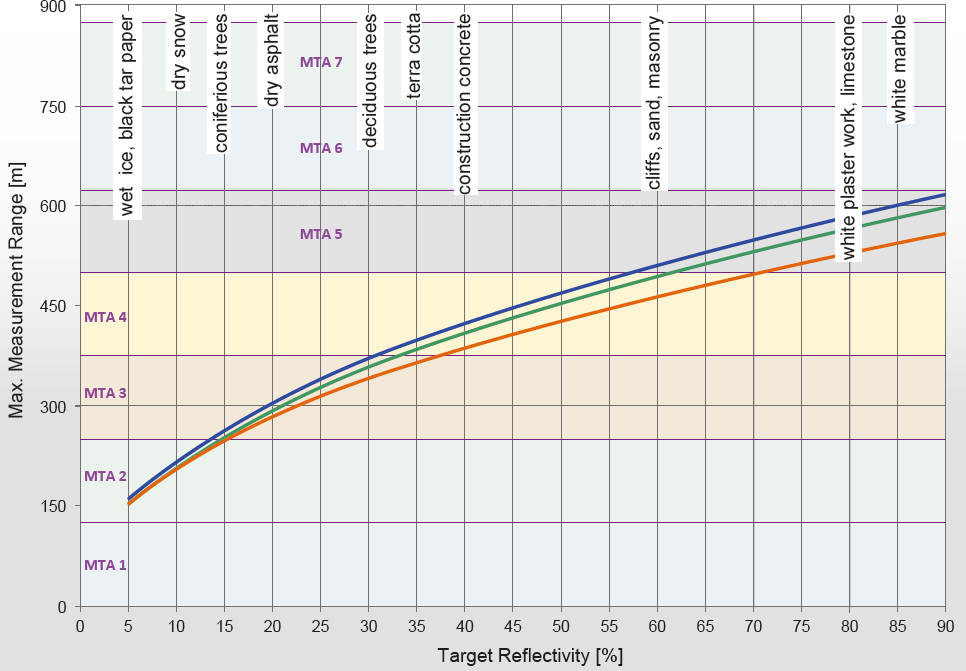
- określanie stref MTA dla chmury punktów
- rejestracja danych w czasie rzeczywistym
Częstotliwość wysyłania wiązki lasera
PRR = 50 kHz
PRR = 100 kHz
PRR = 300 kHz
PRR = 600 kHz
PRR = 1200 kHz
Legenda
Przykładowe ustawienia rozdzielczości skanowania
Panorama 20 | Panorama 40 | Panorama 50 | Panorama 60 | Panorama 80 | |
Rozdzielczość skanowania | 0.2 stopnia | 0.4 stopnia | 0.5 stopnia | 0.6 stopnia | 0.8 stopnia |
Czas skanowania * | 180 sek. | 45 sek. | 30 sek. | 25 sek. | 19 sek. |
Ilość punktów ** | 90 mln | 22,5 mln | 14,4 mln | 10 mln | 5,6 mln |
Rozdzielczość na 20m | 7 mm | 14 mm | 17,5 mm | 21 mm | 28 mm |
Rozdzielczość na 50m | 17 mm | 34 mm | 44 mm | 52 mm | 70 mm |
Ilość wykonanych skanów w 8 godz. *** | 140 | 400 | 505 | 555 | 626 |
* dla pełnego skanu (pełne pole widzenia = 100 x 360 stopni) z programem 1200 kHZ ** wartość przybliżona dla pełnego skanu *** w przybliżeniu zakładając 20-25 sekund do zmiany stanowiska | |||||
Parametry zasięgu skanera
50 kHZ | 100 kHz | 300 kHz | 600 kHz | 1200 kHz | |
Częstotliwość pomiarów na sekundę | 21 000 | 42 000 | 125 000 | 225 000 | 500 000 |
Maksymalny zasięg skanowania | |||||
naturalne cele z p ≥ 90% | 2 500 m | 1 850 m | 1 100 m | 800 m | 600 m |
naturalne cele z p ≥ 20% | 1 300 m | 950 m | 540 m | 380 m | 290 m |
Minimalny zasięg | 2,0 m | 1,5 m | 1,5 m | 1,0 m | 1,0 m |
Maksymalna ilość punktów z 1 pulsu | 15 | 15 | 15 | 8 | 4 |
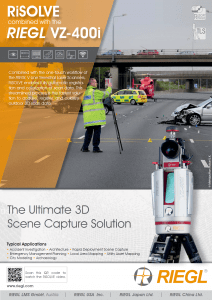
RIEGL VMZ
Przekształć naziemny skaner RIEGL VZ/VZ-i w hybrydowy system do skanowania mobilnego VMZ.
To hybrydowy system skanowania mobilnego w pełni zintegrowany i dokładny, który umożliwia łączenie pozyskanych danych (statycznych i kinematycznych) z wykorzystaniem pojedynczego skanera laserowego RIEGLVZ-400 (i), VZ-1000 lub VZ-2000 (i) – co przyczynia się do obniżenia kosztów i szybszy zwrot z inwestycji.
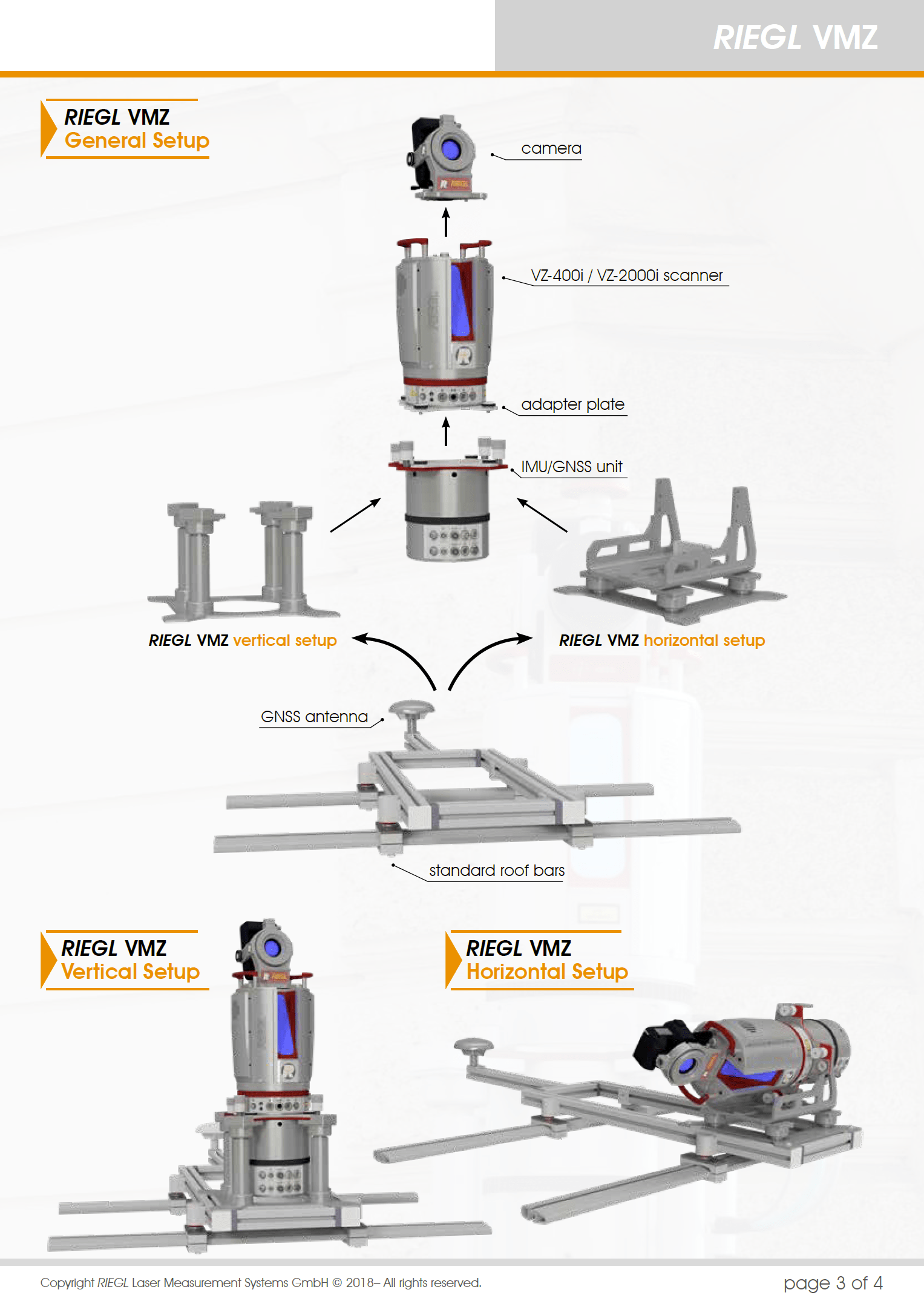
System montażu skanera RIEGL VZ 400(i)/2000(i)

RIEGL RiPANO
RIPANO jest oprogramowaniem do szybkiej i łatwej wizualizacji projektów z naziemnego skanowania laserowego. Pozwala on użytkownikowi systemu CAD na łatwe wyodrębnienie widoków i wydruków ortogonalnych w celu ich późniejszego wykorzystania w oprogramowaniu CAD. Oprogramowanie działa bez wtyczek w przeglądarce internetowej lub samodzielnie na komputerze z systemem Windows lub MacOS.

Wideo
Do pobrania
Dane techniczne
RIEGL VZ-2000i
Broszura
RIEGL VZ-2000i

Dane techniczne
RiSCAN PRO
Dane techniczne
RiSOLVE

Dane techniczne
RiMINING

Broszura
LIS GeoTec Plugin

Dane techniczne
RiMONITOR

Dane techniczne
RBLI 2900
Dane techniczne
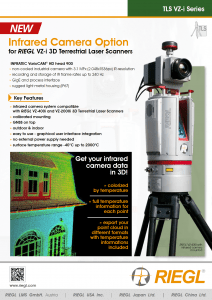
kamera termalna

Dane techniczne
kamera przemysłowa
Menu